


Amb el desenvolupament de la indústria del comerç electrònic, el mercat requereix una velocitat de distribució i logística més ràpida. Al mateix temps, l'augment dels preus del treball fa que es revaloritzi el valor del sistema de “béns per a les persones”. El mercat descobreix gradualment que el sistema de "béns a la gent" pot alleujar la pressió de l'emmagatzematge i la logística. Fins ara, s'han produït nous canvis en el procés d'automatització de magatzems: des de l'emmagatzematge manual tradicional a l'emmagatzematge mecanitzat mitjançant cintes transportadores, vehicles de transport, etc., passant per l'emmagatzematge automàtic integrat. Actualment, l'aplicació de la intel·ligència artificial i els algorismes ha entrat oficialment en una nova etapa d'automatització d'emmagatzematge. Hercules Hegerls és ben conscient que la construcció de magatzems automatitzats requereix la integració de diversos equips i tecnologies logístiques. Recentment, el sistema kubao desenvolupat per Hegerls mostra la funció d'acoblament perfecta des de la transmissió fins a l'emmagatzematge i la classificació en l'escenari d'emmagatzematge. Al mateix temps, la perfecta cooperació entre el sistema kubao i el braç robot també pot fer que la capacitat d'integració d'emmagatzematge del sistema kubao sigui més visible. Aleshores, què és un manipulador d'emmagatzematge no tripulat totalment automàtic? Quin tipus de posició dominant ocupa en l'emmagatzematge de mercaderies? 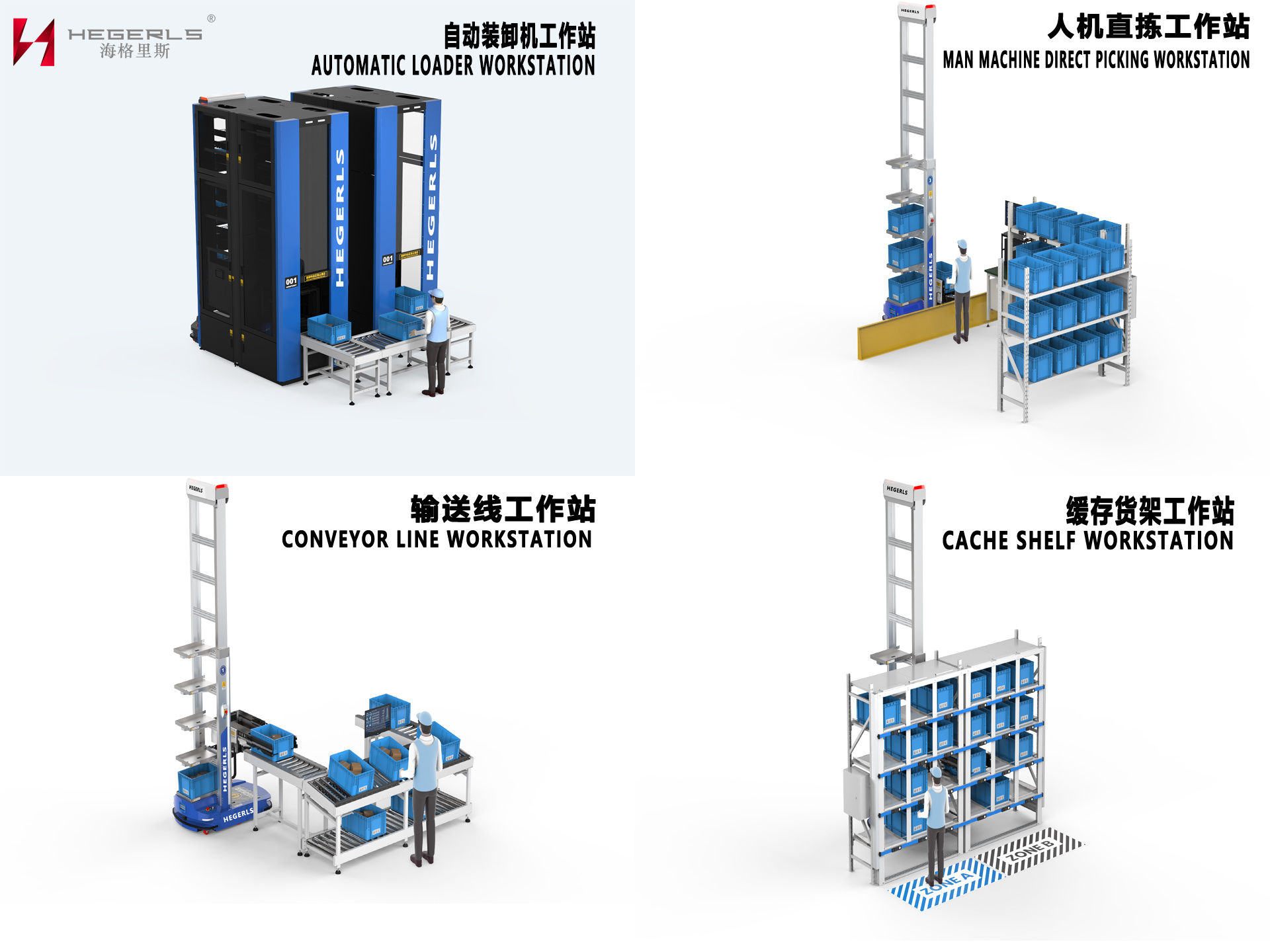 Hercules Hegels ha aprofundit en els problemes dels usuaris, ha entès les noves necessitats del mercat i ha desenvolupat contínuament solucions innovadores adequades per a diferents escenaris. Pel que fa a la interacció home-ordinador, hagerls té la seva pròpia comprensió única i ha dissenyat diversos modes i esquemes d'interacció home-ordinador, com ara l'estació de treball de càrrega automàtica, l'estació de treball de classificació directa home-ordinador, l'estació de treball de línia transportadora, l'estació de treball de prestatge de memòria cau i l'estació de treball de manipulador. . La classificació específica és la següent: En primer lloc, l'estació de treball de recollida directa home-màquina A l'estació de treball de classificació directa home-màquina, l'operador pot classificar directament a la cistella de la màquina, i la classificació només es pot completar configurant una estació de treball i una pistola d'escaneig. En segon lloc, l'estació de treball de la línia de transmissió El robot es connecta amb la línia transportadora. El robot posa la caixa de material a la cistella de la línia transportadora i la línia transportadora envia la caixa de material a les persones que tenen davant. La gent recull directament a la caixa de material, la qual cosa millora molt la comoditat de recollida de l'operador i evita problemes de seguretat. En tercer lloc, l'estació de treball del prestatge de memòria cau El robot posa la caixa de material al prestatge de la memòria cau i la gent fa la recollida al prestatge. Els robots s'alliberen i se'n van, alliberant l'eficiència. En quart lloc, estació de treball de càrrega automàtica Per tal de donar el màxim partit a la sinergia de l'eficiència home-ordinador, Haggis Hegerls va inventar la màquina automàtica de càrrega i descàrrega, que va tornar a subvertir la interacció de les mercaderies amb les persones. Combinat amb les característiques eficients de manipulació de diversos contenidors de kubao, es va adonar de la càrrega i descàrrega de diversos contenidors i va millorar molt l'eficiència de l'emmagatzematge i l'emmagatzematge. La màquina automàtica de càrrega i descàrrega està especialment dissenyada per al sistema de robot d'emmagatzematge de caixes, innovant encara més el mode d'interacció entre mercaderies i persones, enriquint els tipus d'estacions de treball del sistema de magatzem i millorant l'eficiència de les operacions del magatzem.
Hercules Hegels ha aprofundit en els problemes dels usuaris, ha entès les noves necessitats del mercat i ha desenvolupat contínuament solucions innovadores adequades per a diferents escenaris. Pel que fa a la interacció home-ordinador, hagerls té la seva pròpia comprensió única i ha dissenyat diversos modes i esquemes d'interacció home-ordinador, com ara l'estació de treball de càrrega automàtica, l'estació de treball de classificació directa home-ordinador, l'estació de treball de línia transportadora, l'estació de treball de prestatge de memòria cau i l'estació de treball de manipulador. . La classificació específica és la següent: En primer lloc, l'estació de treball de recollida directa home-màquina A l'estació de treball de classificació directa home-màquina, l'operador pot classificar directament a la cistella de la màquina, i la classificació només es pot completar configurant una estació de treball i una pistola d'escaneig. En segon lloc, l'estació de treball de la línia de transmissió El robot es connecta amb la línia transportadora. El robot posa la caixa de material a la cistella de la línia transportadora i la línia transportadora envia la caixa de material a les persones que tenen davant. La gent recull directament a la caixa de material, la qual cosa millora molt la comoditat de recollida de l'operador i evita problemes de seguretat. En tercer lloc, l'estació de treball del prestatge de memòria cau El robot posa la caixa de material al prestatge de la memòria cau i la gent fa la recollida al prestatge. Els robots s'alliberen i se'n van, alliberant l'eficiència. En quart lloc, estació de treball de càrrega automàtica Per tal de donar el màxim partit a la sinergia de l'eficiència home-ordinador, Haggis Hegerls va inventar la màquina automàtica de càrrega i descàrrega, que va tornar a subvertir la interacció de les mercaderies amb les persones. Combinat amb les característiques eficients de manipulació de diversos contenidors de kubao, es va adonar de la càrrega i descàrrega de diversos contenidors i va millorar molt l'eficiència de l'emmagatzematge i l'emmagatzematge. La màquina automàtica de càrrega i descàrrega està especialment dissenyada per al sistema de robot d'emmagatzematge de caixes, innovant encara més el mode d'interacció entre mercaderies i persones, enriquint els tipus d'estacions de treball del sistema de magatzem i millorant l'eficiència de les operacions del magatzem.

En l'etapa posterior, Hegerls també va desenvolupar el manipulador Hegerls, és a dir, l'estació de treball de manipulador d'emmagatzematge no tripulat totalment automàtic de Hegerls, que es realitza principalment pel manipulador en lloc de manual, acoblant-se amb l'estació de treball de la línia transportadora o l'estació de treball del carregador automàtic. La línia de transport o la màquina automàtica de càrrega i descàrrega està connectada amb robots de la sèrie kubao per transportar automàticament les caixes de material descarregat o les caixes de material que s'han de carregar. El braç mecànic substitueix els treballadors per classificar les mercaderies de comanda i realitza el procés d'emmagatzematge no tripulat totalment automàtic. Té els avantatges de l'automatització intel·ligent, el cost laboral zero, l'emmagatzematge i l'emmagatzematge eficients. Kubao realitza emmagatzematge i manipulació intel·ligents a la zona del dipòsit, atracant el braç mecànic, classificació intel·ligent de mercaderies petites pel braç mecànic i el procés de lliurament i emmagatzematge es completa amb la línia transportadora. S'omet el procés de classificació de la plataforma d'operació manual i tot el procés d'operació no tripulada és aplicable a diversos escenaris d'aplicació, inclosa l'arribada de mercaderies i la fabricació de producció. Escenari aplicable: és especialment aplicable a l'escenari de recollida d'articles al detall de supermercats.


Característiques funcionals de l'estació de treball manipuladora d'emmagatzematge no tripulada totalment automàtica de Hagerls Allibera la mà d'obra: realitza un emmagatzematge totalment automàtic i no tripulat, substitueix els treballadors per classificar mercaderies i realitza un emmagatzematge i emmagatzematge totalment automatitzat; Classificació intel·ligent: el sistema de plataforma de gestió intel·ligent haiq es connecta perfectament amb el sistema de control de moviment del manipulador i envia directament instruccions per guiar el manipulador per classificar mercaderies; Acoblament flexible: acoblament amb robots kubao, línies de transport, prestatgeries de memòria cau o màquines automàtiques de càrrega i descàrrega per satisfer les necessitats dels diferents escenaris empresarials; Emmagatzematge i sortida eficients: cada robot porta 25-35 caixes per hora + 25-35 caixes per hora, i l'eficiència d'emmagatzematge i sortida pot arribar fins a 300 caixes per hora.


Hagerls se centra en l'R + D i el disseny de sistema de robot d'emmagatzematge intel·ligent, i es compromet a reduir costos i augmentar l'eficiència dels clients mitjançant la tecnologia de robots i l'algoritme d'intel·ligència artificial, per tal de crear un sistema d'emmagatzematge intel·ligent eficient, intel·ligent i flexible. El reconeixement del mercat i dels clients es convertirà en el motor del progrés continu d'Hegels. Hagerls estarà profundament compromès en la innovació i la R + D, centrant-se en la R + D i el disseny de sistema de robot d'emmagatzematge intel·ligent. Al mateix temps, desenvoluparà una gamma més àmplia d'escenaris d'aplicació per resoldre els problemes d'emmagatzematge dels clients i satisfer les necessitats d'emmagatzematge dels clients. Els robots i la tecnologia d'intel·ligència artificial estan inaugurant una època daurada del desenvolupament, amb oportunitats i reptes que coexisteixen. En el futur, hagerls s'adherirà a la innovació i els avenços tecnològics, se centrarà en la segmentació dels robots d'emmagatzematge de caixes i optimitzarà gradualment la matriu de productes i funcions en funció dels punts dolorosos d'emmagatzematge del client, per tal de liderar encara més el desenvolupament i el progrés de la segmentació. indústria.
Hora de publicació: 08-jul-2022